算子级并行
![]()
概述
随着深度学习的发展,网络模型正变得越来越大,如NLP领域已出现万亿级参数量的模型,模型容量远超单个设备的内存容量,导致单卡或数据并行均无法进行训练。算子级并行是通过将网络模型中每个算子涉及到的张量进行切分,当仅切分数据维度时,为逻辑上的数据并行,当仅切分模型维度时,为逻辑上的模型并行,通过降低单个设备的内存消耗,从而使大模型的训练成为可能。目前支持并行的算子列表,可以参考算子级并行使用约束。
算子级并行模型支持的硬件平台包括Ascend、GPU,需要在Graph模式下运行。
相关接口:
mindspore.set_auto_parallel_context(parallel_mode=ParallelMode.SEMI_AUTO_PARALLEL):设置半自动并行模式,必须在初始化网络之前调用。mindspore.ops.Primitive.shard():指定算子切分策略,详细案例请参考本章的基本原理。mindspore.ops.Primitive.add_prim_attr():为满足不同场景诉求,部分算子能通过add_prim_attr接口对其分布式实现进行配置,这些配置仅对SEMI_AUTO_PARALLEL与AUTO_PARALLEL模式适用,例如:ops.Gather().add_prim_attr("manual_split", split_tuple):该接口配置Gather算子的第一个输入非均匀切分,它仅对axis=0时有效。其中split_tuple是一个元素为int类型的元组,元素之和须等于Gather算子第一个输入的第零维的长度,元组个数须等于Gather算子第一个输入的第零维切分份数。ops.Gather().add_prim_attr("primitive_target", "CPU"):该接口配置Gather算子在CPU上执行,用于异构场景。ops.Reshape().add_prim_attr("skip_redistribution"):对于ops.Reshape的前后不进行张量重排布(张量重排布见基本原理)。ops.ReduceSum().add_prim_attr("cross_batch"):该接口仅对Reduce类算子适用。当配置这个参数后,Reduce类算子如果轴被切分,则会对分片完成reduce操作后不进行多卡之间的同步,结果会和单卡不等价。ops.TensorScatterUpdate().add_prim_attr("self_define_shard", True): 对于任意打上self_define_shard标签的算子,可以支持对该算子(无论是否实现过算子切分)配置输入输出Layout。但是输入输出Layout的正确性以及算子切分后的精度需要由用户保证。
基本原理
MindSpore对每个算子独立建模,用户可以设置正向网络中每个算子的切分策略(对于未设置的算子,默认按数据并行进行切分)。
在构图阶段,框架将遍历正向图,根据算子的切分策略对每个算子及其输入张量进行切分建模,使得该算子的计算逻辑在切分前后保持数学等价。框架内部使用Tensor Layout来表达输入输出张量在集群中的分布状态,Tensor Layout中包含了张量和设备间的映射关系,用户无需感知模型各切片在集群中如何分布,框架将自动调度分配。框架还将遍历相邻算子间张量的Tensor Layout,如果前一个算子输出张量作为下一个算子的输入张量,且前一个算子输出张量的Tensor Layout与下一个算子输入张量的Tensor Layout不同,则需要在两个算子之间进行张量重排布(Tensor Redistribution)。对于训练网络来说,框架处理完正向算子的分布式切分之后,依靠框架的自动微分能力,即能自动完成反向算子的分布式切分。
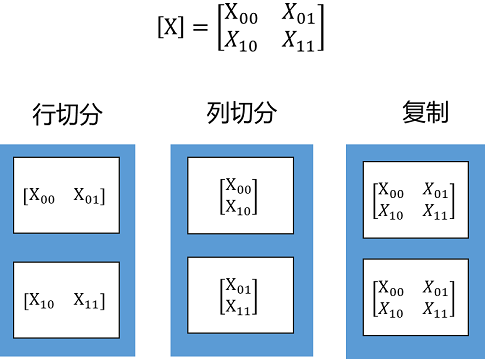
Tensor Layout用于描述Tensor在集群中的分布信息,Tensor可以按某些维度切分到集群,也可以在集群上复制。下面这个例子中,将一个二维矩阵切分到两个节点,有三种切分方式:行切分、列切分及复制(每种切分方式即对应于一种Tensor Layout),如下图所示:
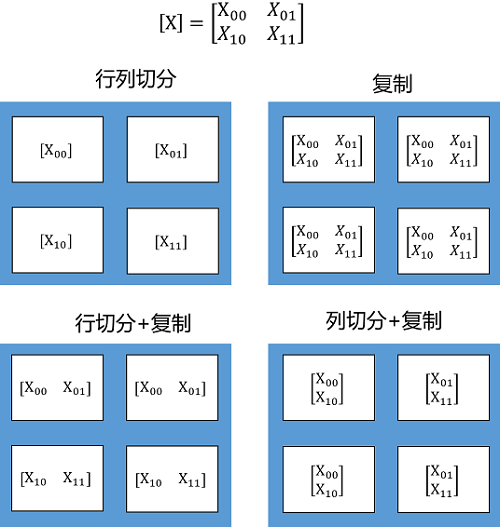
如果将二维矩阵切分到4个节点,则有四种切分方式,行列同时切分、复制、行切分+复制、列切分+复制,如下图所示:
Tensor Redistribution用于处理不同Tensor Layout之间的转换,它能在集群中将Tensor从一种排布转换成另外一种排布。所有重排布操作,都会被分解成“集合通信+split+concat”等算子组合。下面两张图说明了几种Tensor Redistribution的操作。
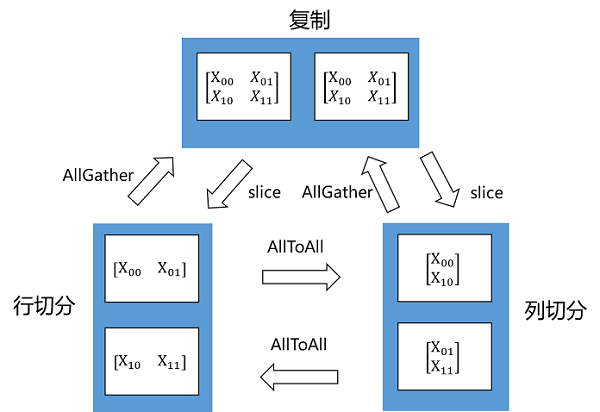
图:Tensor切分到两个节点的重排
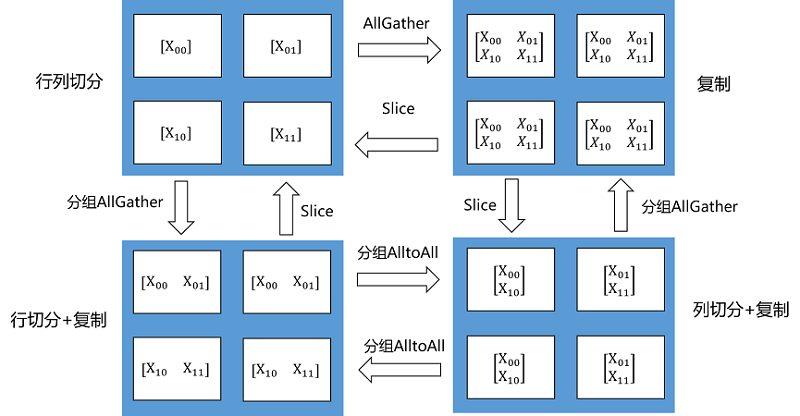
图:Tensor切分到四个节点的重排
用户可以使用shard()接口来设置算子的切分策略,该接口可以描述算子的每个输入张量的每个维度如何切分。比如MatMul().shard(((a, b), (b, c)))表示MatMul有两个输入张量,对第一个输入张量的行均匀切分a份,列均匀切分b份;对第二个输入张量的行均匀切分b份,列均匀切分c份。
import mindspore.nn as nn
from mindspore import ops
import mindspore as ms
ms.set_auto_parallel_context(parallel_mode=ms.ParallelMode.SEMI_AUTO_PARALLEL, device_num=4)
class DenseMatMulNet(nn.Cell):
def __init__(self):
super(DenseMatMulNet, self).__init__()
self.matmul1 = ops.MatMul().shard(((4, 1), (1, 1)))
self.matmul2 = ops.MatMul().shard(((1, 1), (1, 4)))
def construct(self, x, w, v):
y = self.matmul1(x, w)
z = self.matmul2(y, v)
return z
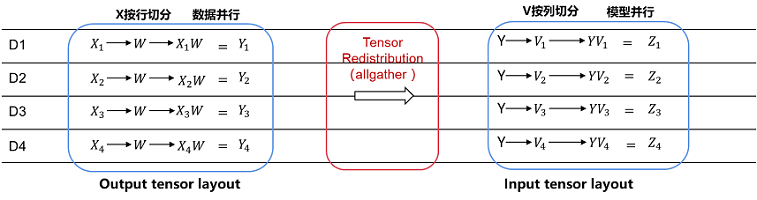
在以上例子中,用户在4个卡上计算两个连续的二维矩阵乘:Z = (X * W) * V 。第一个矩阵乘Y = X * W,用户想把X按行切4份(即数据并行);而第二个矩阵乘Z = Y * V,用户想把V按列切4份(即模型并行):
由于第一个算子输出的Tensor Layout是第零维切分到集群,而第二个算子要求第一个输入Tensor在集群上复制。所以在图编译阶段,会自动识别两个算子输出/输入之间Tensor Layout的不同,从而自动推导出Tensor重排布的算法。而这个例子所需要的Tensor重排布是一个AllGather算子(注:MindSpore的AllGather算子会自动把多个输入Tensor在第零维进行合并)
操作实践
下面以Ascend或者GPU单机8卡为例,进行算子级并行操作说明:
样例代码说明
下载完整的样例代码:distributed_operator_parallel。
目录结构如下:
└─ sample_code
├─ distributed_operator_parallel
├── distributed_operator_parallel.py
└── run.sh
...
其中,distributed_operator_parallel.py是定义网络结构和训练过程的脚本。run.sh是执行脚本。
配置分布式环境
通过context接口指定运行模式、运行设备、运行卡号等,与单卡脚本不同,并行脚本还需指定并行模式parallel_mode为半自动并行模式,并通过init初始化HCCL或NCCL通信。max_device_memory限制模型最大可以的设备内存,为了在Ascend硬件平台上给通信留下足够的设备内存,GPU则不需要预留。此处不设置device_target会自动指定为MindSpore包对应的后端硬件设备。
import mindspore as ms
from mindspore.communication import init
ms.set_context(mode=ms.GRAPH_MODE)
ms.set_context(max_device_memory="28GB")
ms.set_auto_parallel_context(parallel_mode=ms.ParallelMode.SEMI_AUTO_PARALLEL)
init()
ms.set_seed(1)
数据集加载
在算子级并行场景下,数据集加载方式与单卡加载方式一致,代码如下:
import os
import mindspore.dataset as ds
def create_dataset(batch_size):
dataset_path = os.getenv("DATA_PATH")
dataset = ds.MnistDataset(dataset_path)
image_transforms = [
ds.vision.Rescale(1.0 / 255.0, 0),
ds.vision.Normalize(mean=(0.1307,), std=(0.3081,)),
ds.vision.HWC2CHW()
]
label_transform = ds.transforms.TypeCast(ms.int32)
dataset = dataset.map(image_transforms, 'image')
dataset = dataset.map(label_transform, 'label')
dataset = dataset.batch(batch_size)
return dataset
data_set = create_dataset(32)
定义网络
在当前半自动并行模式下,需要用ops算子(Primitive)定义网络。用户可以在单卡网络的基础上手动配置一些算子的切分策略,例如配置策略后的网络结构为:
import mindspore as ms
from mindspore import nn, ops
class Network(nn.Cell):
def __init__(self):
super().__init__()
self.flatten = ops.Flatten()
self.fc1_weight = ms.Parameter(initializer("normal", [28*28, 512], ms.float32))
self.fc2_weight = ms.Parameter(initializer("normal", [512, 512], ms.float32))
self.fc3_weight = ms.Parameter(initializer("normal", [512, 10], ms.float32))
self.matmul1 = ops.MatMul()
self.relu1 = ops.ReLU()
self.matmul2 = ops.MatMul()
self.relu2 = ops.ReLU()
self.matmul3 = ops.MatMul()
def construct(self, x):
x = self.flatten(x)
x = self.matmul1(x, self.fc1_weight)
x = self.relu1(x)
x = self.matmul2(x, self.fc2_weight)
x = self.relu2(x)
logits = self.matmul3(x, self.fc3_weight)
return logits
net = Network()
net.matmul1.shard(((2, 4), (4, 1)))
net.relu1.shard(((4, 1),))
net.matmul2.shard(((1, 8), (8, 1)))
net.relu2.shard(((8, 1),))
以上网络的ops.MatMul()和ops.ReLU()算子都配置了切分策略,以net.matmul1.shard(((2, 4), (4, 1)))为例,它的切分策略为:第一个输入的行切分2份,列切分4份;第二个输入的行切分4份;对于net.relu2.shard(((8, 1),)),它的切分策略为:第一个输入的行切分8份。需要注意的是,由于此处的两个ops.ReLU()的切分策略不同,所以要分别定义两次。
训练网络
在这一步,我们需要定义损失函数、优化器以及训练过程,这部分与单卡写法一致:
import mindspore as ms
from mindspore import nn
optimizer = nn.SGD(net.trainable_params(), 1e-2)
loss_fn = nn.CrossEntropyLoss()
def forward_fn(data, target):
logits = net(data)
loss = loss_fn(logits, target)
return loss, logits
grad_fn = ms.value_and_grad(forward_fn, None, net.trainable_params(), has_aux=True)
@ms.jit
def train_step(inputs, targets):
(loss_value, _), grads = grad_fn(inputs, targets)
optimizer(grads)
return loss_value
for epoch in range(10):
i = 0
for image, label in data_set:
loss_output = train_step(image, label)
if i % 10 == 0:
print("epoch: %s, step: %s, loss is %s" % (epoch, i, loss_output))
i += 1
运行单机8卡脚本
接下来通过命令调用对应的脚本,以mpirun启动方式,8卡的分布式训练脚本为例,进行分布式训练:
bash run.sh
训练完后,日志文件保存到log_output目录下,其中部分文件目录结构如下:
└─ log_output
└─ 1
├─ rank.0
| └─ stdout
├─ rank.1
| └─ stdout
...
关于Loss部分结果保存在log_output/1/rank.*/stdout中,示例如下:
epoch: 0, step: 0, loss is 2.3026192
epoch: 0, step: 10, loss is 2.2928686
epoch: 0, step: 20, loss is 2.279024
epoch: 0, step: 30, loss is 2.2548661
epoch: 0, step: 40, loss is 2.192434
epoch: 0, step: 50, loss is 2.0514572
epoch: 0, step: 60, loss is 1.7082529
epoch: 0, step: 70, loss is 1.1759918
epoch: 0, step: 80, loss is 0.94476485
epoch: 0, step: 90, loss is 0.73854053
epoch: 0, step: 100, loss is 0.71934
...
其他启动方式如动态组网、rank table的启动可参考启动方式。