在 MindSpore AKG Agent 中的 Harness 设计:面向长程任务的状态机方法
在 MindSpore AKG Agent 中的 Harness 设计:面向长程任务的状态机方法
当 Agent 需要连续运行数十小时甚至上百小时,且无人实时监督时,仅靠提示词约束其流程、记忆与行为边界,几乎必然会在若干轮后偏离预期。这些约束写入系统消息,指令偏移的风险始终存在。
更可靠的做法是:将约束以代码逻辑的形式实现在外层 harness 中,让 Agent 专注于推理、方向判断与代码修改,而流程控制与边界检查由 harness 保障。Anthropic 曾精辟地概括过纯提示词驱动的困境:
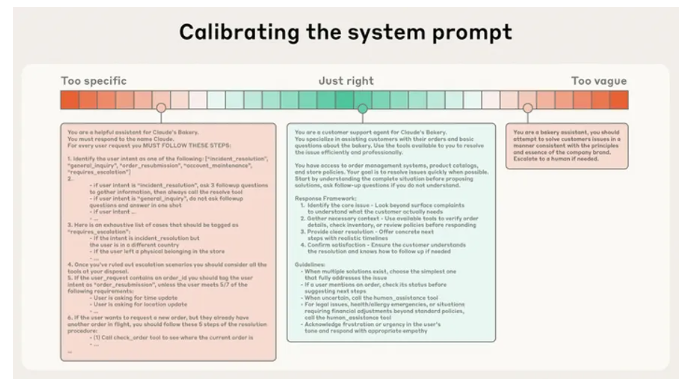
“这两种都不是良好的提示词范式:
一种是用脆弱的硬编码 if-else 过分详细地描述流程;
另一种是提示词过于模糊或错误地预设了上下文。”
何时赋予自由、何时划定边界?本文以 MindSpore AKG Agent 中的算子性能调优任务 Auto Research(自动研究循环)为场景,提出一种基于状态机的 harness 设计——在保留 Agent 自主性的前提下,让长程任务跑得稳、可追溯、可复现。
01 Auto Research 与 Agent Loop 结构
Auto Research 源名于 Karpathy 近期公开的一个原型项目,用于迭代优化其 nanochat(GPT-2 的简化教学实现)的模型与性能。任务设定为:人提供优化指标(如 validation loss)、待优化对象集合、版本控制工具(如 git);其余循环由 Agent 执行。人定义目标和对象,Agent 尝试不同修改路径。该模式可推广至算子库性能调优、推理内核优化、数据配方搜索、提示词工程等场景。
Auto Research 的核心难点在于保持循环流程的长期稳定:每轮 Agent 需基于当前代码与反馈自主决策下一步,同时必须防止以下行为:
- 跳过评测环节
- 修改验收标准
- 遗忘已失败的方向
- 在上下文压缩后丢失历史经验
Agent 使用工具的常见模式是 ReAct(Reasoning-Action)交替循环。ReAct 在单步层面有效,但其线性结构无法自动完成“完成一轮后回到起点开始下一轮”的回环。Auto Research 恰恰需要这种回环。
围绕 ReAct 外层的约束设计,常见两类方案:
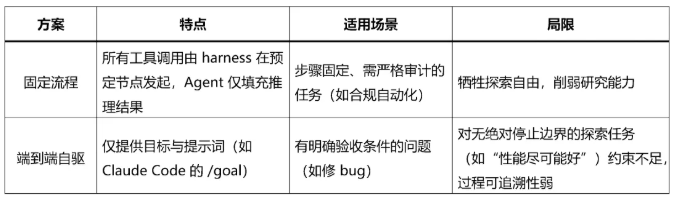
Auto Research 的目标通常没有预设的终止阈值,同时要求过程可复现、可审计。上述任一方案均不充分。需要一种在端到端自驱与固定 workflow 之间可连续调节的 harness 设计。
02 状态机与 ReAct 的分工
状态机位于固定流程与端到端自驱的中间地带。它不替代 Agent 做每步决策,仅规定:当前所处阶段、可转移的下一个阶段集合、需跨阶段保存的状态。
阶段内部仍运行 ReAct:Agent 自主决定查阅哪些文件、调用哪些工具、如何修改代码、何时判定本阶段完成。状态机定义流程框架,Agent在框架内执行ReAct。
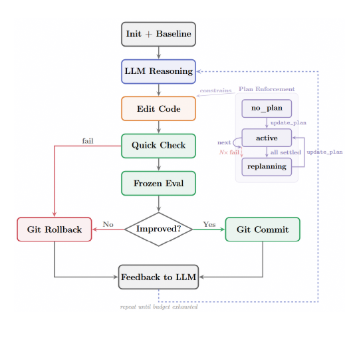
以算子优化任务为例,用户提供:reference.py(PyTorch实现,用作写法参考和精度验证)和kernel.py(triton-ascend 算子的初始实现)。ReAct Agent 在外层状态机控制下执行四阶段循环:plan → edit → eval → decision,逐轮调优 kernel。其中包含两类状态机:
- Auto Research 主循环状态机:观察 → 修改 → 评测 → 回滚/保留。
- PLAN 状态机:每次代码编辑对应一个落盘的 PLAN 项,将探索动作与反馈从对话上下文中剥离保存。
连续失败时,框架自动挂起当前方向,启动一个上下文隔离的 Subagent 重新诊断并生成新方向。运行预算耗尽后输出总结报告。
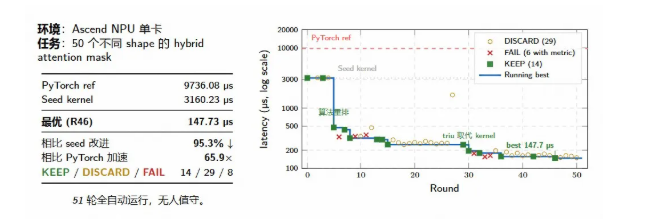
在一个hybrid attention mask triton-ascend算子利用 Auto Research 迭代的过程中,外围框架实现了"保留性能最好的版本(KEEP),回滚性能退化(DISCARD)、精度不符/编译错误(FAIL) 的版本”。图中曲线呈现的性能收益来自参数调整和写法改动,如:
1.算法重排:合并 seed kernel 中的若干次连续访存,移除冗余条件分支;
2.以 torch.ones + triu 取代 arange 广播 ;
3.去除冗余的 mask 构造。
可见 Auto Research 在triton-ascend算子调优过程中,能够自行组合、探索各种可叠加的性能优化写法。
在上述的 Auto Research 过程中,当 Agent 行为符合提示词描述时,状态机构成的约束几乎不被感知;约束实际发挥作用的时刻是 Agent 试图跳过计划、绕过评测、修改验收条件或提前结束时——harness 将流程拉回允许范围。
该结构可推广至更一般的工作流:
- 对于端到端验证类任务,其目标仅在于最终输出是否通过验收,中间过程无需追溯。此时状态机可退化为单状态:进入后执行 ReAct 循环,输出通过验收则终止,否则继续运行。
- 对于多阶段任务,则需为每个阶段明确定义交付物格式及阶段间的状态转移规则,Auto Research 即属此类。
同一任务在不同审计要求下,harness 的形态存在显著差异。若要求全流程可审计,状态机应划分更细粒度,交付物的格式约束亦须更严格;若仅关注最终结果的有效性,一个简单的循环结构配合少量提示词即可满足需求。
03 上下文管理:状态机带来的三个好处
状态机的另一个重要作用,是把上下文管理从 Agent 自己维护的内容里独立出来一部分。以下是三个和上下文管理相关设计。
3.1 落盘的 PLAN 文件
Auto Research 本质上是枚举式探索:将已有任务资料、性能观察、论文方法、社区经验和模型知识重组并逐一验证。每一尝试对应一个优化方向,每一次评测给出判断。有效探索的前提是:已失败的方向不再重复,未尝试的方向不被遗漏。这要求 Agent 长期保持对探索历史与结果的清晰认知。
仅依赖对话历史难以满足:
- 历史迅速膨胀超出上下文窗口;
- /compact 压缩后细节损失严重;
- 即使未溢出,Agent 决策需要的是简短结论,而非原始日志和完整代码变动;
PLAN 文件仅记录可复用、可比较的结论,如方向尝试、性能指标、失败原因摘要;原始评测输出、代码细节、重复的中间过程不进入 PLAN 文件,也不进入 Agent 上下文。这种记录方式比长度驱动的自动压缩更适配 Auto Research。
Agent 对长上下文的依赖因此降低:上下文被压缩或从断点恢复时,仅需读取 PLAN 文件即可恢复历史信息。一个昇腾算子优化任务可直接从 PLAN 文件与 git 历史等落盘产物中在新会话内重建,无需依赖底层 ReAct Agent 的上下文管理能力。
3.2 Subagent 的使用
Subagent 在此设计中作为上下文隔离工具,用于两类场景: 1、主 Agent 累积困境时切换视角:连续失败后,主 Agent 上下文被相似失败推理充斥,易陷入局部最优。启动一个零上下文的 Subagent 重新判断方向,比在原上下文内挣扎更有效。 2、处理与主线无关的复杂子任务:如跨文件代码定位、多步检索。Subagent 完成后再返回端到端结论,避免挤占主 Agent 上下文。
核心结论:多 Agent 拆解并不自动优于单 Agent。对于需要单一连贯输出的任务(如代码修改),多个 Agent 并行修改同一对象易导致风格冲突与重复失败。Auto Research 的主体执行始终由单一主 Agent 推进,仅在主 Agent 反复失败、需要新视角时才由 Subagent 临时介入。
3.3 端到端评测托管
Harness 设计应使 Agent 的 ReAct 动作集中于与任务直接相关的活动。以算子优化为例,Agent 最应进行两类操作:理解性能相关的资料、编写代码改动;这两者的产出直接服务于下一步判断。
除此之外,每轮运行还有大量必须执行但无需推理的动作:
- 运行评测、解析结果
- 判定改动优劣、保留或回滚版本
- 等待工具输出、检查必要条件
这些动作的触发条件和行为可预先确定,应由 harness 执行。若交由 Agent 执行,会产生两个问题:
- 这些动作的输出占用上下文,挤占真正有价值的性能信息
- Agent 有时会为了推进任务而修改这些步骤本身(如放宽验收容差、跳过检查或调整参照实现)
将上述步骤交由 harness 后:
- Agent 无法修改这些步骤,也无需为其分配上下文;
- Harness 负责回滚错误改动、保留最佳版本,Agent 每轮开始时均面对已验证的最佳代码状态;
- 每轮问题的结构保持一致,Agent 无需额外上下文处理历史遗留;
- Harness 输出格式相对固定,可提高 LLM 调用的 KV Cache 命中率,降低 API 开销;
04 总 结
本文讨论了在保留 Agent 自主性的前提下,通过 harness 层面约束使 Agent 工作流更加可控的方案。
Agent 的编排本身可视为一种新的编程范式:传统编程是设计确定性的、可预期产出的代码,使其主动执行;Agent 的自主性打开了确定性之外的空间,编程工作的重心相应地转移为约束 Agent 动作的可能空间。
文中基于状态机的 harness 设计,正是这一新范式下一种可调节且对 Agent 行为亲和的具体实现方式。
05 社区与互动
昇思MindSpore AKG是面向多硬件的图算协同加速器组件,致力于持续引领业界先进算子编译生成技术,助力开源人工智能生态繁荣发展。我们始终秉持开源开放的合作理念,持续欢迎开发者提交Issue、贡献代码或分享迁移经验。无论您是企业用户还是个人开发者,都可以通过直接访问官方代码仓参与共建或加入AKG SIG参与交流。

欢迎您通过AtomGit Issues来提交问题、报告与建议。
欢迎您通过社区论坛进行技术、问题交流。
欢迎您通过Sig来管理和改善工作流程,参与讨论。
让我们共同推动图算协同加速器的创新生态繁荣,让更多开发者受益于高效、易用的昇腾图算优化方案。