二维圆柱绕流
![]()
![]()
![]()
本案例要求MindSpore版本 >= 2.0.0调用如下接口: mindspore.jit,mindspore.jit_class,mindspore.jacrev。
概述
圆柱绕流,是指二维圆柱低速定常绕流的流型只与Re数有关。在Re≤1时,流场中的惯性力与粘性力相比居次要地位,圆柱上下游的流线前后对称,阻力系数近似与Re成反比,此Re数范围的绕流称为斯托克斯区;随着Re的增大,圆柱上下游的流线逐渐失去对称性。这种特殊的现象反映了流体与物体表面相互作用的奇特本质,求解圆柱绕流则是流体力学中的经典问题。
由于控制方程纳维-斯托克斯方程(Navier-Stokes equation)难以得到泛化的理论解,使用数值方法对圆柱绕流场景下控制方程进行求解,从而预测流场的流动,成为计算流体力学中的样板问题。传统求解方法通常需要对流体进行精细离散化,以捕获需要建模的现象。因此,传统有限元法(finite element method,FEM)和有限差分法(finite difference method,FDM)往往成本比较大。
物理启发的神经网络方法(Physics-informed Neural Networks),以下简称PINNs,通过使用逼近控制方程的损失函数以及简单的网络构型,为快速求解复杂流体问题提供了新的方法。本案例利用神经网络数据驱动特性,结合PINNs求解圆柱绕流问题。
问题描述
纳维-斯托克斯方程(Navier-Stokes equation),简称N-S方程,是流体力学领域的经典偏微分方程,在粘性不可压缩情况下,无量纲N-S方程的形式如下:
其中,Re表示雷诺数。
本案例利用PINNs方法学习位置和时间到相应流场物理量的映射,实现N-S方程的求解:
技术路径
MindFlow求解该问题的具体流程如下:
创建数据集。
构建模型。
自适应损失的多任务学习。
优化器。
NavierStokes2D。
模型训练。
模型推理及可视化
[1]:
import time
import numpy as np
import mindspore
from mindspore import context, nn, ops, Tensor, jit, set_seed, load_checkpoint, load_param_into_net
from mindspore import dtype as mstype
下述src包可以在applications/physics_driven/flow_past_cylinder/src下载。
[2]:
from mindflow.cell import MultiScaleFCCell
from mindflow.loss import MTLWeightedLossCell
from mindflow.pde import NavierStokes, sympy_to_mindspore
from mindflow.utils import load_yaml_config
from src import create_training_dataset, create_test_dataset, calculate_l2_error
set_seed(123456)
np.random.seed(123456)
[3]:
# set context for training: using graph mode for high performance training with GPU acceleration
config = load_yaml_config('cylinder_flow.yaml')
context.set_context(mode=context.GRAPH_MODE, device_target="GPU", device_id=3)
use_ascend = context.get_context(attr_key='device_target') == "Ascend"
创建数据集
本案例对已有的雷诺数为100的标准圆柱绕流进行初始条件和边界条件数据的采样。对于训练数据集,构建平面矩形的问题域以及时间维度,再对已知的初始条件,边界条件采样;基于已有的流场中的点构造测试集。
下载训练与测试数据集: physics_driven/flow_past_cylinder/dataset 。
[4]:
# create training dataset
cylinder_flow_train_dataset = create_training_dataset(config)
cylinder_dataset = cylinder_flow_train_dataset.create_dataset(batch_size=config["train_batch_size"],
shuffle=True,
prebatched_data=True,
drop_remainder=True)
# create test dataset
inputs, label = create_test_dataset(config["test_data_path"])
./flow_past_cylinder/dataset
get dataset path: ./flow_past_cylinder/dataset
check eval dataset length: (36, 100, 50, 3)
构建模型
本示例使用一个简单的全连接网络,深度为6层,激活函数是tanh函数。
[5]:
coord_min = np.array(config["geometry"]["coord_min"] + [config["geometry"]["time_min"]]).astype(np.float32)
coord_max = np.array(config["geometry"]["coord_max"] + [config["geometry"]["time_max"]]).astype(np.float32)
input_center = list(0.5 * (coord_max + coord_min))
input_scale = list(2.0 / (coord_max - coord_min))
model = MultiScaleFCCell(in_channels=config["model"]["in_channels"],
out_channels=config["model"]["out_channels"],
layers=config["model"]["layers"],
neurons=config["model"]["neurons"],
residual=config["model"]["residual"],
act='tanh',
num_scales=1,
input_scale=input_scale,
input_center=input_center)
自适应损失的多任务学习
同一时间,基于PINNs的方法需要优化多个loss,给优化过程带来的巨大的挑战。我们采用Kendall, Alex, Yarin Gal, and Roberto Cipolla. “Multi-task learning using uncertainty to weigh losses for scene geometry and semantics.” CVPR, 2018. 论文中提出的不确定性权重算法动态调整权重。
[6]:
mtl = MTLWeightedLossCell(num_losses=cylinder_flow_train_dataset.num_dataset)
优化器
[7]:
if config["load_ckpt"]:
param_dict = load_checkpoint(config["load_ckpt_path"])
load_param_into_net(model, param_dict)
load_param_into_net(mtl, param_dict)
# define optimizer
params = model.trainable_params() + mtl.trainable_params()
optimizer = nn.Adam(params, config["optimizer"]["initial_lr"])
模型训练
使用MindSpore >= 2.0.0的版本,可以使用函数式编程范式训练神经网络。
[9]:
def train():
problem = NavierStokes2D(model)
from mindspore.amp import DynamicLossScaler, auto_mixed_precision, all_finite
if use_ascend:
loss_scaler = DynamicLossScaler(1024, 2, 100)
auto_mixed_precision(model, 'O3')
else:
loss_scaler = None
# the loss function receives 5 data sources: pde, ic, ic_label, bc and bc_label
def forward_fn(pde_data, ic_data, ic_label, bc_data, bc_label):
loss = problem.get_loss(pde_data, ic_data, ic_label, bc_data, bc_label)
if use_ascend:
loss = loss_scaler.scale(loss)
return loss
grad_fn = ops.value_and_grad(forward_fn, None, optimizer.parameters, has_aux=False)
# using jit function to accelerate training process
@jit
def train_step(pde_data, ic_data, ic_label, bc_data, bc_label):
loss, grads = grad_fn(pde_data, ic_data, ic_label, bc_data, bc_label)
if use_ascend:
loss = loss_scaler.unscale(loss)
if all_finite(grads):
grads = loss_scaler.unscale(grads)
loss = ops.depend(loss, optimizer(grads))
return loss
steps = config["train_steps"]
sink_process = mindspore.data_sink(train_step, cylinder_dataset, sink_size=1)
model.set_train()
for step in range(steps + 1):
local_time_beg = time.time()
cur_loss = sink_process()
if step % 100 == 0:
print(f"loss: {cur_loss.asnumpy():>7f}")
print("step: {}, time elapsed: {}ms".format(step, (time.time() - local_time_beg)*1000))
calculate_l2_error(model, inputs, label, config)
[10]:
time_beg = time.time()
train()
print("End-to-End total time: {} s".format(time.time() - time_beg))
momentum_x: u(x, y, t)*Derivative(u(x, y, t), x) + v(x, y, t)*Derivative(u(x, y, t), y) + Derivative(p(x, y, t), x) + Derivative(u(x, y, t), t) - 0.00999999977648258*Derivative(u(x, y, t), (x, 2)) - 0.00999999977648258*Derivative(u(x, y, t), (y, 2))
Item numbers of current derivative formula nodes: 6
momentum_y: u(x, y, t)*Derivative(v(x, y, t), x) + v(x, y, t)*Derivative(v(x, y, t), y) + Derivative(p(x, y, t), y) + Derivative(v(x, y, t), t) - 0.00999999977648258*Derivative(v(x, y, t), (x, 2)) - 0.00999999977648258*Derivative(v(x, y, t), (y, 2))
Item numbers of current derivative formula nodes: 6
continuty: Derivative(u(x, y, t), x) + Derivative(v(x, y, t), y)
Item numbers of current derivative formula nodes: 2
ic_u: u(x, y, t)
Item numbers of current derivative formula nodes: 1
ic_v: v(x, y, t)
Item numbers of current derivative formula nodes: 1
bc_u: u(x, y, t)
Item numbers of current derivative formula nodes: 1
bc_v: v(x, y, t)
Item numbers of current derivative formula nodes: 1
bc_p: p(x, y, t)
Item numbers of current derivative formula nodes: 1
loss: 0.762854
step: 0, time elapsed: 8018.740892410278ms
predict total time: 348.56629371643066 ms
l2_error, U: 0.929843072812499 , V: 1.0664025634627166 , P: 1.2470654215761847 , Total: 0.9487255679809018
==================================================================================================
loss: 0.099878
step: 100, time elapsed: 364.26734924316406ms
predict total time: 26.329755783081055 ms
l2_error, U: 0.32336308802455266 , V: 0.9999815366016505 , P: 0.7799935842779347 , Total: 0.43305926535738415
==================================================================================================
loss: 0.099729
step: 200, time elapsed: 365.6139373779297ms
predict total time: 31.240463256835938 ms
l2_error, U: 0.3234011910681541 , V: 1.0001619978094591 , P: 0.7813910733696886 , Total: 0.4331668769990714
==================================================================================================
loss: 0.093919
step: 300, time elapsed: 367.8765296936035ms
predict total time: 25.576353073120117 ms
l2_error, U: 0.30047520000238387 , V: 1.000794648538466 , P: 0.79058399174337 , Total: 0.4185132401858534
==================================================================================================
loss: 0.054179
step: 400, time elapsed: 364.1970157623291ms
predict total time: 29.039621353149414 ms
l2_error, U: 0.20330252312566804 , V: 0.9996817093977537 , P: 0.7340101922590306 , Total: 0.359612937152551
==================================================================================================
...
==================================================================================================
loss: 0.000437
step: 11700, time elapsed: 369.844913482666ms
predict total time: 98.89841079711914 ms
l2_error, U: 0.05508347849471555 , V: 0.21316098417551024 , P: 0.2859434784168006 , Total: 0.08947950657758963
==================================================================================================
loss: 0.000499
step: 11800, time elapsed: 380.2335262298584ms
predict total time: 108.20960998535156 ms
l2_error, U: 0.054145983320779696 , V: 0.21175303254015415 , P: 0.28978443844341173 , Total: 0.08892416803453118
==================================================================================================
loss: 0.000634
step: 11900, time elapsed: 396.8188762664795ms
predict total time: 98.45995903015137 ms
l2_error, U: 0.05270965792134252 , V: 0.2132374431010393 , P: 0.29610047782600435 , Total: 0.08883453152457486
==================================================================================================
loss: 0.000495
step: 12000, time elapsed: 373.43478202819824ms
predict total time: 89.78271484375 ms
l2_error, U: 0.05282220780283167 , V: 0.20572236320159534 , P: 0.28065431462629 , Total: 0.0864571051248727
==================================================================================================
End-to-End total time: 4497.61700296402 s
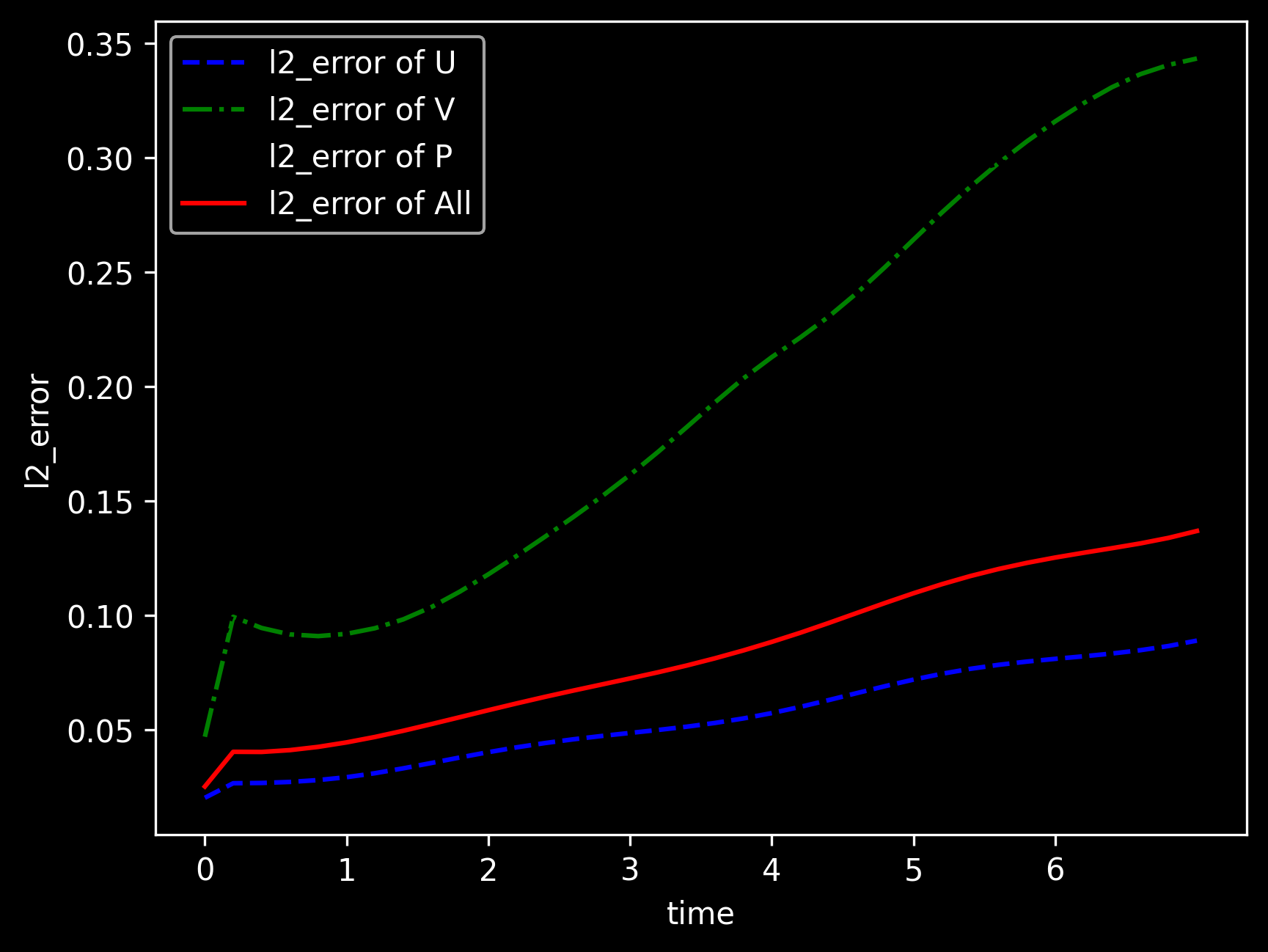
模型推理及可视化
训练后可对流场内所有数据点进行推理,并可视化相关结果。
[11]:
from src import visualization
# visualization
visualization(model=model, step=config["train_steps"], input_data=inputs, label=label)