Network Migration Debugging Example
Translator: AQUA
![]()
This chapter will introduce the basic steps of network migration, common tools, ideas for locating problems and solutions with use cases.
Here we take the classical network ResNet50 as an example and introduce the network migration method in detail with codes.
Analysis and Reproduce of the Benchmark Network
Determining the Migration Target
The first step of network migration is to determine the migration goal, that is, first find a proper and achievable standard. Usually the delivery goal of a deep neural network includes the following four parts.
network implementation: this is the most basic part of the migration goal. Sometimes a single neural network may have different versions, a single version may be implemented differently, or a single neural network may adopt different configurations of hyperparameters, and these differences will have some impacts on the final convergence accuracy and performance. Usually, we take the neural network author’s own implementation as the standard, but we can also refer to the official implementations of different frameworks (e.g., TensorFlow, PyTorch, etc.) or other mainstream open source toolkits (e.g., MMDetection).
dataset: the same neural network and parameters often vary greatly in datasets, so we need to confirm the dataset used for the migration network. The data content of some datasets will be updated frequently, and it is necessary to pay attention to the version of the dataset, the ratio of training data to test data division, etc. when determining the dataset.
convergence accuracy: different frameworks, GPU models, and whether the distributed training will have an impact on the accuracy, so we need to analyze the framework, hardware and other information of the benchmark when determining the migration target.
training performance: the same as convergence accuracy. Training performance is mainly affected by the network script, framework performance, GPU hardware itself and whether the distributed training is or not.
ResNet50 Migration Example
ResNet50 is a classic deep neural network in CV, which attracts more developers’ attention and replication, and the syntax of PyTorch is more similar to MindSpore, so we choose PyTorch as the benchmark framework.
The official PyTorch implementation script can be found at torchvision model or Nvidia PyTorch implementation script, which includes implementations of the mainstream ResNet family of networks (ResNet18, ResNet18, ResNet18, ResNet18, and ResNet18). (ResNet18, ResNet34, ResNet50, ResNet101, ResNet152). The dataset used for ResNet50 is ImageNet2012, and the convergence accuracy can be found in PyTorch Hub.
Developers can run PyTorch-based ResNet50 scripts directly on the benchmark hardware environment and then computes the performance data, or they can refer to the official data on the same hardware environment. For example, when we benchmark the Nvidia DGX-1 32GB (8x V100 32GB) hardware, we can refer to Nvidia’s official ResNet50 performance data.
Reproduce the Migration Target
Once the network migration target is determined, the next thing to do is to reproduce the metrics. Reproducing benchmark data is essential to the subsequent accuracy and performance tuning. When there is an accuracy/performance gap between the network we developed in MindSpore and the benchmark script, we often use the benchmark data as a base line to analyze the difference between the migration script and the benchmark script step by step. If the benchmark script cannot reproduce the metrics, the MindSpore scripts we develop based on the benchmark will not be able to achieve the migration goals. When reproducing migration metrics, it is not only important to reproduce the training phase, but important to reproduce the inference phase.
It is important to note that for some networks, using the same hardware environment and scripts, the final convergence accuracy and performance may be slightly different from the results presented by the original authors, which is a normal range of fluctuation. The fluctuation should be taken into account when migrating the network.
Reproduce the Single Step Results
The main purpose of reproducing the single Step results is for the next script development and network tuning. For complex neural networks, the complete training takes days or even months, and only if the final training accuracy and results are used as reference, it will greatly reduce the development efficiency. Therefore, we need to reproduce the results of a single Step in advance, i.e., get the state of the network after executing only the first Step (the state is the result after data preprocessing, weight initialization, forward calculation, loss calculation, reverse gradient calculation and optimizer update, covering all aspects of network training), and use it as a reference to start the subsequent development work.
Script Development
Pre-script Development Analysis
Before starting the actual script development, a benchmark script analysis is performed. The purpose of the script analysis is to identify missing operators or features in MindSpore compared to the benchmark framework. The methodology can be found in the Script Evaluation Tutorial.
MindSpore supports most of the common functions and operators. MindSpore supports both dynamic graph (PyNative) mode and static graph (Graph) mode. Dynamic graph mode is flexible and easy to debug, so dynamic graph mode is mainly used for network debugging. Static graph mode has good performance and is mainly used for whole network training. When analyzing missing operators and functions, these two modes should be analyzed separately.
If missing operators and functions are found, we can first consider combining the missing operators and functions based on the current operators or functions, and for mainstream CV and NLP class networks, new missing operators can generally be solved by combining existing operators.
The combined operator can be implemented by means of a Cell. In MindSpore, nn class operator is implemented via this way. For example, the following ReduceSumExp operator is a combination of the existing Exp, ReduceSum, and Log suboperators.
class ReduceLogSumExp(Cell):
def __init__(self, axis, keep_dims=False):
super(ReduceLogSumExp, self).__init__()
validator.check_value_type('axis', axis, [int, list, tuple], self.cls_name)
validator.check_value_type('keep_dims', keep_dims, [bool], self.cls_name)
self.axis = axis
self.exp = ops.Exp()
self.sum = ops.ReduceSum(keep_dims)
self.log = ops.Log()
def construct(self, x):
exp = self.exp(x)
sumexp = self.sum(exp, self.axis)
logsumexp = self.log(sumexp)
return logsumexp
If the missing functions and operators cannot be circumvented, or if the performance of the combined operators is poor, which seriously affects the training and inference of the network, you can contact MindSpore Community for feedback and we will have a dedicated staff to solve it for you.
ResNet50 Migration Example
The following is the structure of the ResNet family of networks.
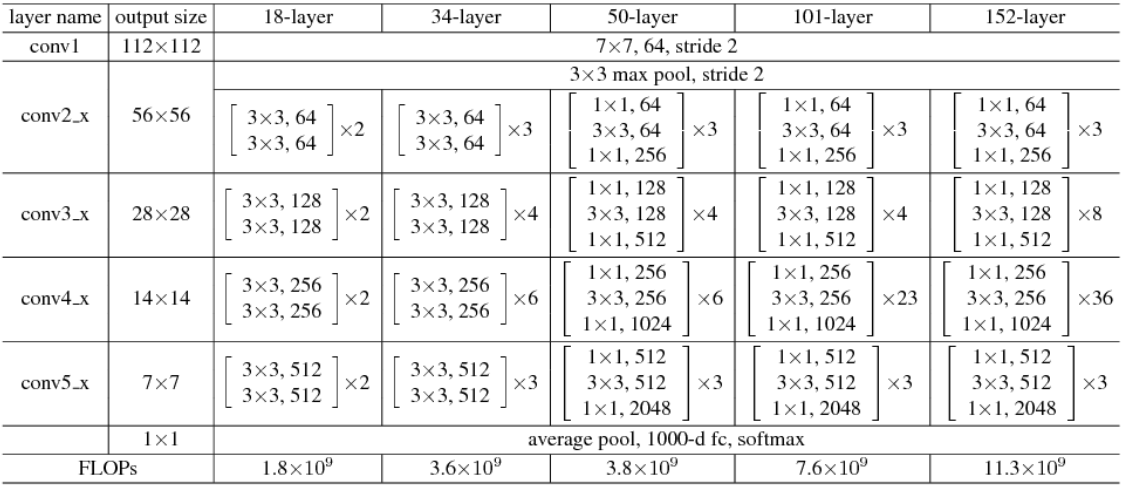
The PyTorch implementation of the ResNet50 script is referenced in the torchvision model.
We can analyze it based on both operator and function aspects.
Operator analysis
PyTorch operator |
MindSpore operator |
supported |
|---|---|---|
|
|
yes |
|
|
yes |
|
|
yes |
|
|
yes |
|
none |
no |
|
|
yes |
|
|
yes |
Note: For PyTorch scripts, MindSpore provides the PyTorch operator mapping, which can directly query whether the operator is supported.
Function Analysis
Pytorch Features |
MindSpore Features |
|---|---|
|
|
|
|
|
|
|
|
|
|
|
|
(Since the interface design of MindSpore and PyTorch are not exactly the same, only the key functions are listed here for comparison)
After the operator and function analysis, we found that compared to PyTorch, MindSpore has no missing functions, but nn.AdaptiveAvgPool is missing in the operatpr. In this way, we need to further analyzed whether the missing operator has a replaceable plan. In the ResNet50 network, the input image shape is fixed and uniformed as N,3,224,224, where N is the batch size, 3 is the number of channels, 224 and 224 are the width and height of the image respectively, and the operators that change the image size in the network are Conv2d and Maxpool2d, and the effect of these two operators on the shape is fixed, so the input and output shapes of nn.AdaptiveAvgPool2D can be determined in advance. As long as we calculate the input and output shapes of nn.AdaptiveAvgPool2D, it is implemented via nn.AvgPool and nn.ReduceMean. The absence of this operator is replaceable and does not affect the training of the network.
Data Preprocessing
To understand the implementation of a neural network, it is necessary to know the input data of the network first, so data preprocessing is the first part of the script development. MindSpore has designed a module dedicated to data processing - MindData, and data preprocessing with MindData consists of the following steps:
importing the data path and reading the data file.
parsing the data.
data processing (e.g. common data slicing, shuffle, data augmentation, etc.).
data distribution (distribution of data in batch_size units, distributed training involves multi-machine distribution).
In the process of reading and parsing data, MindSpore provides a more friendly data format - MindRecord. Users can convert the dataset in regular format to MindSpore data format, i.e. MindRecord, so that it can be easily loaded into MindSpore for training. At the same time, MindSpore is optimized for performance in some scenarios, and better performance can be obtained by using the MindRecord data format.
Data processing is usually the most time-consuming phase of data preparation, and most of the operations on data are included in this step, such as Resize, Rescale, Crop, etc. in CV-like networks. MindSpore provides a set of common data processing integration interfaces, which can be called directly by users without implementing them. These integration interfaces not only improve the user-friendliness, but also improve the performance of data preprocessing and reduce the time consumption of data preparation during training. For details, please refer to the Data Preprocessing Tutorial.
In the data distribution, MindData provides an extremely simple API, which can be used to batch combination and repeating of data by directly calling batch and repeat operations.
When the above 4 steps are completed, we can theoretically get the exact same data after processing the dataset by using MindSpore script and benchmark script processing dataset (if there are operations that introduce random cases need to be removed).
ResNet50 Migration Example
The ResNet50 network uses the ImageNet2012 dataset with the following PyTorch code for data pre-processing:
# sample execution (requires torchvision)
from PIL import Image
from torchvision import transforms
input_image = Image.open(filename)
preprocess = transforms.Compose([
transforms.Resize(256),
transforms.CenterCrop(224),
transforms.ToTensor(),
transforms.Normalize(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225]),
])
input_tensor = preprocess(input_image)
input_batch = input_tensor.unsqueeze(0) # create a mini-batch as expected by the model
By looking at the above code, we find that the data preprocessing of ResNet50 mainly does Resize, CenterCrop, and Normalize operations, and there are two ways to implement these operations in MindSpore, one is to use MindSpore’s data processing module MindData to call the encapsulated data preprocessing interface, and the other is loading through Custom Dataset. It is more recommended for developers to choose the first way, which not only can reduce the development of repetitive code and the introduction of errors, but also can get better data processing performance. For more information about MindData data processing, please refer to the Data Pipeline section in tutorials.
The following data processing functions are developed based on MindData:
import os
from mindspore import dtype as mstype
import mindspore.dataset as ds
import mindspore.dataset.vision.c_transforms as C
import mindspore.dataset.transforms.c_transforms as C2
def create_dataset(dataset_path, batch_size=32, rank_size=1, rank_id=0, do_train=True):
"""
create a train or eval imagenet2012 dataset for resnet50
Args:
dataset_path(string): the path of dataset.
batch_size(int): the batch size of dataset. Default: 32
rank_size(int): total num of devices for training. Default: 1,
greater than 1 in distributed training
rank_id(int): logical sequence in all devices. Default: 1,
can be greater than i in distributed training
Returns:
dataset
"""
data_set = ds.ImageFolderDataset(dataset_path, num_parallel_workers=8, shuffle=do_train,
num_shards=rank_size, shard_id=rank_id)
mean = [0.485 * 255, 0.456 * 255, 0.406 * 255]
std = [0.229 * 255, 0.224 * 255, 0.225 * 255]
# define map operations
trans = [
C.Decode(),
C.Resize(256),
C.CenterCrop(224),
C.Normalize(mean=mean, std=std),
C.HWC2CHW()
]
type_cast_op = C2.TypeCast(mstype.int32)
data_set = data_set.map(operations=trans, input_columns="image", num_parallel_workers=8)
data_set = data_set.map(operations=type_cast_op, input_columns="label", num_parallel_workers=8)
# apply batch operations
data_set = data_set.batch(batch_size, drop_remainder=do_train)
return data_set
In the above code we can find that for common classical datasets (e.g. ImageNet2012), MindData also provides us with ImageFolderDataset interface to read the raw data directly, which saves the workload of reading files by hand-written code. It should be noted that MindData creates datasets with different parameters for single-machine training and multi-machine distributed training, and distributed training requires two additional parameters num_shard and shard_id.
Subnet Development
Usually subnet development consists of two parts: training subnets and loss subnets, where the training subnets can be divided or not depending on the complexity of the network. Developing a large neural network script directly can be overwhelming, so we can separate different modules or submodules of the network as a single subnet to ensure that each subnet is developed in parallel without interfering with each other. After the subnets are developed, we can also fix the subnet inputs and weights to form a comparison with the subnet code of the alignment script, which can be used as test cases for subsequent network development.
During the accuracy tuning phase, we often encounter situations where the accuracy is not up to standard, and then we revisit the developed scripts and troubleshoot them line by line. It is much easier to find suspicious points from dozens of operators than from hundreds of operators, especially when the same subnet is invoked many times, which can reduce a lot of work when we troubleshoot by subnet.
ResNet50 Migration Example
Analyzing the ResNet50 network code, it can be divided into the following main subnets.
conv1x1, conv3x3: convolution with different kernel_size is defined.
BasicBlock: the smallest subnet of ResNet18 and ResNet34 in the ResNet family of networks, consisting of Conv, BN, ReLU and residuals.
BottleNeck: The smallest subnet of ResNet50, ResNet101 and ResNet152 in the ResNet family of networks, with an additional layer of Conv, BN and ReLU compared to BasicBlock, and the convolution position of downsampling has been changed.
ResNet: A network that encapsulates the structure of BasicBlock, BottleNeck and Layer, different ResNet series networks can be constructed by passing different parameters. In this structure, some PyTorch self-defined initialization functions are also used.
Based on the above subnetwork division, we redevelop the above development in conjunction with MindSpore syntax.
For weight initialization, directly see MindSpore’s defined weight initialization methods.
Redeveloping conv3x3 and conv1x1
import mindspore.nn as nn
def _conv3x3(in_channel, out_channel, stride=1):
return nn.Conv2d(in_channel, out_channel, kernel_size=3, stride=stride,
padding=0, pad_mode='same')
def _conv1x1(in_channel, out_channel, stride=1):
return nn.Conv2d(in_channel, out_channel, kernel_size=1, stride=stride,
padding=0, pad_mode='same')
Redevelopment of BasicBlock and BottleNeck.
class ResidualBlockBase(nn.Cell):
def __init__(self,
in_channel,
out_channel,
stride=1):
super(ResidualBlockBase, self).__init__()
self.conv1 = _conv3x3(in_channel, out_channel, stride=stride)
self.bn1d = _bn(out_channel)
self.conv2 = _conv3x3(out_channel, out_channel, stride=1)
self.bn2d = _bn(out_channel)
self.relu = nn.ReLU()
self.down_sample = False
if stride != 1 or in_channel != out_channel:
self.down_sample = True
self.down_sample_layer = None
if self.down_sample:
self.down_sample_layer = nn.SequentialCell([_conv1x1(in_channel, out_channel, stride),
_bn(out_channel)])
def construct(self, x):
identity = x
out = self.conv1(x)
out = self.bn1d(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2d(out)
if self.down_sample:
identity = self.down_sample_layer(identity)
out = out + identity
out = self.relu(out)
return out
class ResidualBlock(nn.Cell):
expansion = 4
def __init__(self,
in_channel,
out_channel,
stride=1):
super(ResidualBlock, self).__init__()
self.stride = stride
channel = out_channel // self.expansion
self.conv1 = _conv1x1(in_channel, channel, stride=1)
self.bn1 = _bn(channel)
if self.stride != 1:
self.e2 = nn.SequentialCell([_conv3x3(channel, channel, stride=1), _bn(channel),
nn.ReLU(), nn.MaxPool2d(kernel_size=2, stride=2, pad_mode='same')])
else:
self.conv2 = _conv3x3(channel, channel, stride=stride)
self.bn2 = _bn(channel)
self.conv3 = _conv1x1(channel, out_channel, stride=1)
self.bn3 = _bn_last(out_channel)
self.relu = nn.ReLU()
self.down_sample = False
if stride != 1 or in_channel != out_channel:
self.down_sample = True
self.down_sample_layer = None
if self.down_sample:
self.down_sample_layer = nn.SequentialCell([_conv1x1(in_channel, out_channel, stride), _bn(out_channel)])
def construct(self, x):
identity = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
if self.stride != 1:
out = self.e2(out)
else:
out = self.conv2(out)
out = self.bn2(out)
out = self.relu(out)
out = self.conv3(out)
out = self.bn3(out)
if self.down_sample:
identity = self.down_sample_layer(identity)
out = out + identity
out = self.relu(out)
return out
Redevelopment of the whole ResNet family of whole nets.
class ResNet(nn.Cell):
"""
ResNet architecture.
Args:
block (Cell): Block for network.
layer_nums (list): Numbers of block in different layers.
in_channels (list): Input channel in each layer.
out_channels (list): Output channel in each layer.
strides (list): Stride size in each layer.
num_classes (int): The number of classes that the training images are belonging to.
Returns:
Tensor, output tensor.
Examples:
>>> ResNet(ResidualBlock,
>>> [3, 4, 6, 3],
>>> [64, 256, 512, 1024],
>>> [256, 512, 1024, 2048],
>>> [1, 2, 2, 2],
>>> 10)
"""
def __init__(self,
block,
layer_nums,
in_channels,
out_channels,
strides,
num_classes):
super(ResNet, self).__init__()
if not len(layer_nums) == len(in_channels) == len(out_channels) == 4:
raise ValueError("the length of layer_num, in_channels, out_channels list must be 4!")
self.conv1 = _conv7x7(3, 64, stride=2)
self.bn1 = _bn(64)
self.relu = ops.ReLU()
self.maxpool = nn.MaxPool2d(kernel_size=3, stride=2, pad_mode="same")
self.layer1 = self._make_layer(block,
layer_nums[0],
in_channel=in_channels[0],
out_channel=out_channels[0],
stride=strides[0])
self.layer2 = self._make_layer(block,
layer_nums[1],
in_channel=in_channels[1],
out_channel=out_channels[1],
stride=strides[1])
self.layer3 = self._make_layer(block,
layer_nums[2],
in_channel=in_channels[2],
out_channel=out_channels[2],
stride=strides[2])
self.layer4 = self._make_layer(block,
layer_nums[3],
in_channel=in_channels[3],
out_channel=out_channels[3],
stride=strides[3])
self.mean = ops.ReduceMean(keep_dims=True)
self.flatten = nn.Flatten()
self.end_point = _fc(out_channels[3], num_classes)
def _make_layer(self, block, layer_num, in_channel, out_channel, stride):
"""
Make stage network of ResNet.
Args:
block (Cell): Resnet block.
layer_num (int): Layer number.
in_channel (int): Input channel.
out_channel (int): Output channel.
stride (int): Stride size for the first convolutional layer.
Returns:
SequentialCell, the output layer.
Examples:
>>> _make_layer(ResidualBlock, 3, 128, 256, 2)
"""
layers = []
resnet_block = block(in_channel, out_channel, stride=stride)
layers.append(resnet_block)
for _ in range(1, layer_num):
resnet_block = block(out_channel, out_channel, stride=1)
layers.append(resnet_block)
return nn.SequentialCell(layers)
def construct(self, x):
x = self.conv1(x)
x = self.bn1(x)
x = self.relu(x)
c1 = self.maxpool(x)
c2 = self.layer1(c1)
c3 = self.layer2(c2)
c4 = self.layer3(c3)
c5 = self.layer4(c4)
out = self.mean(c5, (2, 3))
out = self.flatten(out)
out = self.end_point(out)
return out
Constructing the whole ResNet50 network by passing in information about the number of layers of ResNet50.
def resnet50(class_num=10):
"""
Get ResNet50 neural network.
Args:
class_num (int): Class number.
Returns:
Cell, cell instance of ResNet50 neural network.
Examples:
>>> net = resnet50(10)
"""
return ResNet(ResidualBlock,
[3, 4, 6, 3],
[64, 256, 512, 1024],
[256, 512, 1024, 2048],
[1, 2, 2, 2],
class_num)
After the above steps, the MindSpore-based ResNet50 whole network structure and each subnet structure have been developed, and the next step is to develop other modules.
Other Modules
Other modules usually include: reverse construction, gradient clipping, optimizer, learning rate generation, etc. These modules either have a single structure or rely on the results of the developed subnets in order to compare with the benchmark script. The development of scripts for these modules is less difficult than subnet development.
ResNet50 migration example
For additional training configurations, see Configuration Information for NVIDIA Training ResNet50, the training of ResNet50 mainly involves the following items.
SGD + Momentum optimizer is used.
WeightDecay function is used (but gamma and bias of BatchNorm are not used).
The cosine LR schedule is used.
Label Smoothing is used.
Implementing the SGD optimizer with Momentum, weights are applied to WeightDecay in addition to the gamma and bias of BN:
# define opt
decayed_params = []
no_decayed_params = []
for param in net.trainable_params():
if 'beta' not in param.name and 'gamma' not in param.name and 'bias' not in param.name:
decayed_params.append(param)
else:
no_decayed_params.append(param)
group_params = [{'params': decayed_params, 'weight_decay': weight_decay},
{'params': no_decayed_params},
{'order_params': net.trainable_params()}]
opt = Momentum(group_params, lr, momentum)
For implementing cosine LR schedule, reference on MindSpore Cosine Decay LR
Define Loss Function and implement Label Smoothing.
import mindspore.nn as nn
from mindspore import Tensor
from mindspore import dtype as mstype
from mindspore.nn import LossBase
import mindspore.ops as ops
# define cross entropy loss
class CrossEntropySmooth(LossBase):
"""CrossEntropy"""
def __init__(self, sparse=True, reduction='mean', smooth_factor=0., num_classes=1000):
super(CrossEntropySmooth, self).__init__()
self.onehot = ops.OneHot()
self.sparse = sparse
self.on_value = Tensor(1.0 - smooth_factor, mstype.float32)
self.off_value = Tensor(1.0 * smooth_factor / (num_classes - 1), mstype.float32)
self.ce = nn.SoftmaxCrossEntropyWithLogits(reduction=reduction)
def construct(self, logit, label):
if self.sparse:
label = self.onehot(label, ops.shape(logit)[1], self.on_value, self.off_value)
loss = self.ce(logit, label)
return loss
# define loss with label smooth
label_smooth_factor = 0.1
loss = CrossEntropySmooth(sparse=True, reduction="mean",smooth_factor=label_smooth_factor, num_classes=1000)
Hyperparameters Comparison
When the subnetworks have been opened, the last step to do is to align the hyperparameters with the alignment script to ensure the network structure is consistent. It should be noted that the same set of hyperparameters may have different accuracy performance on different frameworks, so it is not necessary to strictly follow the hyperparameters of the peer script when migrating the network, and fine tuning can be done without changing the network structure.
ResNet50 Migration Example
In the training of ResNet50, the following hyperparameters are mainly involved.
momentum =0.875
batch_size = 256
learning rate = 0.256
learing rate schedule = cosine
weight_decay = 1/32768
label_smooth = 0.1
epoch size = 90
Process Hitting
After the above steps, we have finished developing the necessary scripts for network migration, and the next step is to break through the stand-alone training, distributed training, and inference processes.
Stand-alone Training
ResNet50 Migration Example
For a better reading of the code, it is recommended to organize the script according to the following structure.
.
├── scripts
│ ├── run_distribute_train.sh # launch Ascend distributed training(8ps)
│ ├── run_eval.sh # launch Ascend evaluation
│ └── run_standalone_train.sh # launch Ascend standalone training(1ps)
├── src
│ ├── config.py # configuration
│ ├── cross_entropy_smooth.py # loss definition
│ ├── dataset.py # dataset preprocess
│ └── resnet.py # network structure
├── eval.py # evaluation
└── train.py # training
2 directories, 9 files
train.py is defined as follows:
import os
import argparse
import ast
from mindspore import context
from mindspore import set_seed
from mindspore.nn import Momentum
from mindspore import Model
from mindspore.context import ParallelMode
from mindspore.train.callback import ModelCheckpoint, CheckpointConfig, LossMonitor, TimeMonitor
from mindspore.communication import init
from mindspore.common import initializer
import mindspore.nn as nn
from src.config import config
from src.dataset import create_dataset
from src.resnet import resnet50
from src.cross_entropy_smooth import CrossEntropySmooth
set_seed(1)
parser = argparse.ArgumentParser(description='Image classification')
parser.add_argument('--run_distribute', type=ast.literal_eval, default=False, help='Run distribute')
parser.add_argument('--dataset_path', type=str, default=None, help='Dataset path')
args_opt = parser.parse_args()
if __name__ == '__main__':
device_id = int(os.getenv('DEVICE_ID', '0'))
rank_size = int(os.getenv('RANK_SIZE', '1'))
rank_id = int(os.getenv('RANK_ID', '0'))
# init context
context.set_context(mode=context.GRAPH_MODE, device_target='Ascend', device_id=device_id)
if rank_size > 1:
context.set_auto_parallel_context(device_num=rank_size, parallel_mode=ParallelMode.DATA_PARALLEL,
gradients_mean=True)
context.set_auto_parallel_context(all_reduce_fusion_config=[85, 160])
init()
# create dataset
dataset = create_dataset(args_opt.dataset_path, config.batch_size, rank_size, rank_id)
step_size = dataset.get_dataset_size()
# define net
net = resnet50(class_num=config.class_num)
# init weight
for _, cell in net.cells_and_names():
if isinstance(cell, nn.Conv2d):
cell.weight.set_data(initializer.initializer(initializer.XavierUniform(),
cell.weight.shape,
cell.weight.dtype))
if isinstance(cell, nn.Dense):
cell.weight.set_data(initializer.initializer(initializer.TruncatedNormal(),
cell.weight.shape,
cell.weight.dtype))
lr = nn.dynamic_lr.cosine_decay_lr(config.lr_end, config.lr, config.epoch_size * step_size,
step_size, config.warmup)
# define opt
decayed_params = []
no_decayed_params = []
for param in net.trainable_params():
if 'beta' not in param.name and 'gamma' not in param.name and 'bias' not in param.name:
decayed_params.append(param)
else:
no_decayed_params.append(param)
group_params = [{'params': decayed_params, 'weight_decay': config.weight_decay},
{'params': no_decayed_params},
{'order_params': net.trainable_params()}]
opt = Momentum(group_params, lr, config.momentum)
# define loss
loss = CrossEntropySmooth(sparse=True, reduction="mean", smooth_factor=config.label_smooth_factor,
num_classes=config.class_num)
# define model
model = Model(net, loss_fn=loss, optimizer=opt, metrics={'acc'})
# define callbacks
time_cb = TimeMonitor(data_size=step_size)
loss_cb = LossMonitor()
cb = [time_cb, loss_cb]
if config.save_checkpoint:
#config_ck = CheckpointConfig(save_checkpoint_steps=config.save_checkpoint_epochs * step_size,
config_ck = CheckpointConfig(save_checkpoint_steps=5,
keep_checkpoint_max=config.keep_checkpoint_max)
ckpt_cb = ModelCheckpoint(prefix="resnet", directory=config.save_checkpoint_path, config=config_ck)
cb += [ckpt_cb]
model.train(config.epoch_size, dataset, callbacks=cb, sink_size=step_size, dataset_sink_mode=False)
Note: For codes in other files in the directory, refer to MindSpore ModelZoo’s ResNet50 implementation(this script incorporates other ResNet family networks and ResNet-SE networks, and the specific implementation may differ from the benchmark script).
Distributed Training
Distributed training has no impact on the network structure compared to stand-alone training, and can be done by modifying the stand-alone script by calling the distributed training interface provided by MindSpore, as described in Distributed Training Tutorial.
ResNet50 Migration Example
Add the following interface to the standalone training script.
import os
from mindspore import context
from mindspore.communication import init
device_id = int(os.getenv('DEVICE_ID', '0'))
rank_size = int(os.getenv('RANK_SIZE', '1'))
rank_id = int(os.getenv('RANK_ID', '0'))
# init context
context.set_context(mode=context.GRAPH_MODE, device_target='Ascend', device_id=device_id)
if rank_size > 1:
context.set_auto_parallel_context(device_num=rank_size, parallel_mode=ParallelMode.DATA_PARALLEL,
gradients_mean=True)
context.set_auto_parallel_context(all_reduce_fusion_config=[85, 160])
# init distribute training
init()
Modify the create_dataset interface to shard the data on data load to support distributed training by.
import os
import mindspore.dataset as ds
device_id = int(os.getenv('DEVICE_ID', '0'))
rank_size = int(os.getenv('RANK_SIZE', '1'))
rank_id = int(os.getenv('RANK_ID', '0'))
# rank_size is greater than 1 for distributed training
dataset = create_dataset(args_opt.dataset_path, config.batch_size, rank_size, rank_id)
# ...
Inference
The inference process differs from training in the following ways.
No need to define optimizers.
No need to initialize the weights.
Need to load trained CheckPoint after network is defined.
Define the metric for computing inference accuracy.
ResNet50 Migration Example
Modified inference script:
"""train resnet."""
import os
import argparse
from mindspore import context
from mindspore import set_seed
from mindspore.nn import SoftmaxCrossEntropyWithLogits
from mindspore import Model
from mindspore import load_checkpoint, load_param_into_net
from src.config import config
from src.dataset import create_dataset
from src.resnet import resnet50
from src.cross_entropy_smooth import CrossEntropySmooth
parser = argparse.ArgumentParser(description='Image classification')
parser.add_argument('--checkpoint_path', type=str, default=None, help='Checkpoint file path')
parser.add_argument('--dataset_path', type=str, default=None, help='Dataset path')
args_opt = parser.parse_args()
set_seed(1)
if __name__ == '__main__':
device_id = int(os.getenv('DEVICE_ID', 0))
# init context
context.set_context(mode=context.GRAPH_MODE, device_target='Ascend', device_id=device_id)
# create dataset
dataset = create_dataset(args_opt.dataset_path, config.batch_size, do_train=False)
step_size = dataset.get_dataset_size()
# define net
net = resnet50(class_num=config.class_num)
# load checkpoint
param_dict = load_checkpoint(args_opt.checkpoint_path)
load_param_into_net(net, param_dict)
net.set_train(False)
# define loss, model
loss = CrossEntropySmooth(sparse=True, reduction='mean', smooth_factor=config.label_smooth_factor,
num_classes=config.class_num)
# define model
model = Model(net, loss_fn=loss, metrics={'top_1_accuracy', 'top_5_accuracy'})
# eval model
res = model.eval(dataset)
print("result:", res, "ckpt=", args_opt.checkpoint_path)
Problem Location
You may encounter some interruptions in the training during the process, you can refer to the Network Training Debug Tutorial to locate and solve them.
Full Example
For full example, you can refer to the link: https://gitee.com/mindspore/docs/tree/r1.7/docs/sample_code/migration_sample
Precision Tuning
After hitting the flow, you can get the accuracy of network training by both training and inference steps. Usually, it is difficult to reproduce the accuracy of the alignment script at once, and we need to gradually improve the accuracy by accuracy tuning, which is less intuitive, less efficient, and more work than performance tuning.
Performance Tuning
Usually, we refer to performance tuning to improve training performance with a fixed dataset, network size, and number of hardware, while improving performance by changing dataset size, network size, and number of hardware is obvious and out of the scope of this paper.
Unless the performance problem has seriously hindered the accuracy debugging, the performance tuning must be placed after the accuracy has reached the standard, which has two main reasons: first, many modifications will affect the performance when locating the accuracy problem, making the already tuned performance again not up to standard, which may waste the workload; second, the performance tuning may introduce new accuracy problems, and if there is no accuracy that has reached the standard as a caretaker, the difficulty of locating the accuracy problem introduced this time will be greatly increased later.
Analyzing Profiling Data
Analyzing Profiling data is an essential step in the performance tuning phase, and MindSpore’s performance and precision tuning tool MindInsight provides a rich set of performance and precision tuning methods, and the most important information for performance tuning is the Profiling data. In the iteration trajectory, you can see very detailed information about the start run time, end run time, number of calls and call order of each operator, which is very helpful for our performance tuning. The way to generate Profiling data is as follows:
from mindspore.profiler import Profiler
from mindspore import Model, nn, context
# init context
context.set_context(mode=context.GRAPH_MODE, device_target='Ascend', device_id=int(os.environ["DEVICE_ID"]))
# init profiler, profiling data will be stored under folder ./data by default
profiler = Profiler()
# ...
# start training
Model.train()
# end training, parse profiling data to readable text
profiler.analyse()
For more detailed usage of Profiling, you can refer to Profiling Performance Analysis Methods.
After obtaining Profiling data, we can analyze the performance bottleneck stages and operators, and then perform performance optimization, which can be referred to Performance Tuning Guide.
Common Problems and Corresponding Optimization Methods
MindData Performance
Single-Step performance jitter and data queues that remain empty for a period of time are caused by poor performance of the data preprocessing part, which makes the data processing speed unable to keep up with the single-Step iteration speed, and these two phenomena usually occur in pairs.
When the data processing speed is slow, the queue is gradually depleted from the initial full queue to an empty queue, and the training process will start waiting for the empty queue to be filled with data, and the network will continue the single-step training only once new data is filled. Since there is no queue as buffer for data processing, the performance jitter of data processing is directly reflected in the performance of single-Step, so it will also cause single-Step performance jitter.
For MindData performance issues, refer to MindData in MindInsight Component’s Data Profiling, which gives common problems and solutions to MindData performance.
Multi-machine Synchronization Performance
When distributed training is performed, after the forward propagation and gradient computation are completed during a Step, each machine starts to synchronize the AllReduce gradient, and the AllReduce synchronization time is mainly affected by the number of weights and machines. For more complex, larger machine-sized networks, the AllReduce gradient update time is longer, at which point we can perform AllReduce tangent to optimize this part of the time.
Normally, AllReduce gradient synchronization waits until all the inverse operators are finished, i.e., all the gradients of all weights are computed before synchronizing the gradients of all machines at once, but with AllReduce tangent, we can synchronize the gradients of some weights as soon as they are computed, so that the gradient synchronization and the gradient computation of the remaining operators can be performed in parallel, hiding this part of the AllReduce gradient synchronization time. The tangent strategy is usually a manual attempt to find an optimal solution (supporting slicing greater than two segments). As an example, ResNet50 network has 160 weights and [85, 160] means that the gradient synchronization is performed immediately after the gradient is calculated for the 0th to 85th weights, and the gradient synchronization is performed after the gradient is calculated for the 86th to 160th weights. Here the two segments is sliced, so two gradient synchronizations are required. The code implementation is as follows:
device_id = int(os.getenv('DEVICE_ID', '0'))
rank_size = int(os.getenv('RANK_SIZE', '1'))
rank_id = int(os.getenv('RANK_ID', '0'))
# init context
context.set_context(mode=context.GRAPH_MODE, device_target='Ascend', device_id=device_id)
if rank_size > 1:
context.set_auto_parallel_context(device_num=rank_size, parallel_mode=ParallelMode.DATA_PARALLEL,
gradients_mean=True)
context.set_auto_parallel_context(all_reduce_fusion_config=[85, 160])
init()
Operator Performance
The situation that a single operator takes a long time and the performance of the same operator varies greatly under different shapes or different datatypes is mainly caused by the operator performance problem, which usually has the following two solutions.
Use less computationally intensive data types. For example, there is no significant difference in precision between float16 and float32 for the same operator, so use the less computationally intensive float16 format.
Use other operators with the same algorithm to circumvent it.
If you find any arithmetic with poor performance, we suggest you contact MindSpore Community for feedback, and we will optimize it as soon as we confirm it as the performance problem.
Framework Performance
If there are too many conversion operators (TransData, Cast-like operators) and they take too much time, we can analyze the necessity of Cast operators if we add them manually, and remove the redundant Cast and TransData operators if they have no impact on the accuracy.
If MindSpore automatically generates too many conversion operators, it may be that the MindSpore framework is not fully optimized for some special cases, you can contact MindSpore Community for feedback.
Other General Optimization Methods
Using mixed precision training
The mixed precision training method accelerates the process of deep neural network training by using a mixture of single precision and half precision data formats, while maintaining the network accuracy that can be achieved with single precision training. Mixed precision training accelerates the computation process while reducing memory usage and access, and allows for training larger models or batch sizes on specific hardware.
For details, please refer to the Mixed precision tutorial.
Enabling graph kernel fusion
Graph-calculus fusion is a network performance optimization technique unique to MindSpore. It can automatically analyze and optimize existing network computation graph logic and combine with target hardware capabilities to perform computation reduction and substitution, operator splitting and fusion, operator special case compilation, etc. to improve the utilization of device computation resources and achieve overall optimization of network performance. Compared with traditional optimization techniques, graph computation fusion has unique advantages such as joint optimization of multiple operators across boundaries, cross-layer collaboration with operator compilation, and instant compilation of operators based on Polyhedral. In addition, graph fusion only requires the user to open the corresponding configuration, and then the whole optimization process can be completed automatically, without the need for additional sensing by the network developer, allowing the user to focus on the network algorithm implementation.
The scenarios for graph fusion include: scenarios with high performance requirements for network execution time; scenarios where custom combinatorial operators are implemented by splicing basic operators, and where automatic fusion of these basic operators is desired to improve the performance of the custom combinatorial operators.
For details, please refer to the tutorial on graph arithmetic fusion.